Two-sided Chance-constrained Penetration Trajectory Optimization for Unmanned Combat Aerial Vehicle
Sep 12, 2025·
 ,
,
,
,
,
·
1 min read
,
,
,
,
,
·
1 min read
Xuyang Wu
PeiWang Zhang
Yu Mei
Weijia Wang
Hao Wang
Jia Liu
Abstract
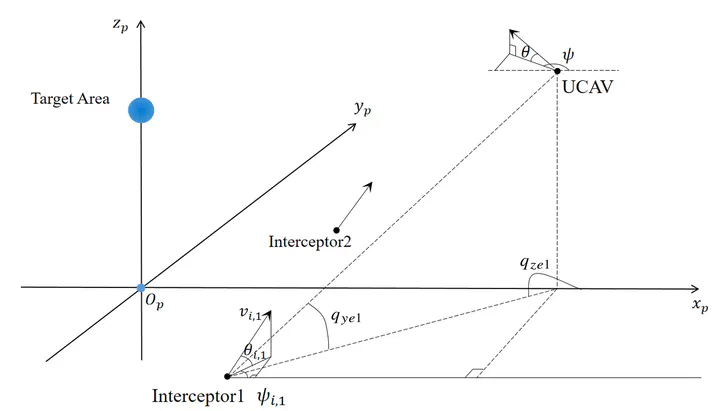
This paper studies the trajectory optimization problem for unmanned combat aerial vehicles with random disturbances in the control process, facing two interceptors, and requiring a specific level of striking precision. The trajectory optimization problem is formulated as a non-convex optimal control problem with chance constraints to restrict the random disturbances on the aircraft’s control parameters. Assuming some normally distributed disturbances, the chance constraints are approximated by a series of linear constraints.Quantitative convergence of the linear approximation proves that the approximation is asymptotically tight and derives the quantitative convergence rate. Furthermore, the paper approximates the motion equations using Taylor expansion and time discretization methods, and finally results in an SOCP model. A sequential SOCP algorithm with trust regions is designed to dynamically update the approximation function. Numerical simulations are conducted on three penetration cases with two interceptor missiles. The results validate that chance constraints can guarantee the stable operation of the aircraft and provide a more robust trajectory compared with the deterministic trajectory optimization model without chance constraints.
Type
Publication
Journal of Aircraft
Click the Viedo button above to view the flight trajectory in the numerical simulation results.



