Chance-Constrained Trajectory Optimization for UAVs with Randomly Moving Obstacles
Abstract
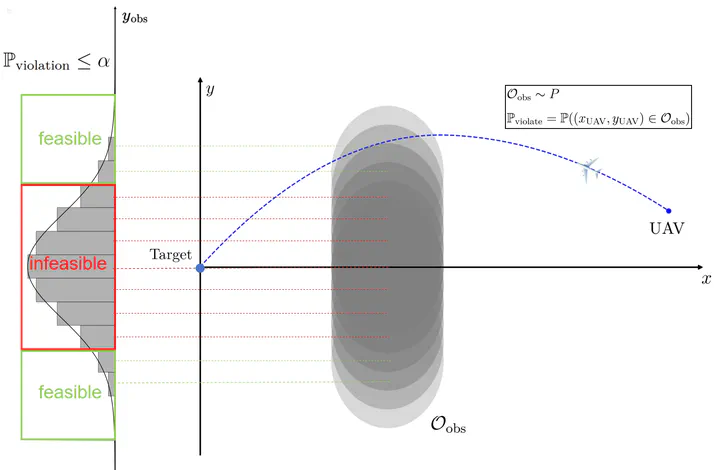
This paper studies the trajectory planning problem for Unmanned Aerial Vehicles (UAVs) to avoid randomly moving obstacles. We model the problem in a chance-constrained trajectory optimization framework, which requires the UAV to avoid random obstacles with a high probability to ensure flight safety. Two types of obstacles are studied: onboard obstacles with invariant but uncertain centers; and dynamically moving obstacles in the air with uncertain horizontal deflection. We apply the sample average approximation method to solve the chance-constrained trajectory optimization problem, leading to a tractable mixed-integer linear programming reformulation. Qualitative convergence results are constructed for the sample average approximation. Numerical experiments demonstrate the effectiveness of the chance-constrained model in generating robust and efficient collision-free trajectories.
Type
Publication
IEEE Transactions on Aerospace and Electronic Systems
Click the Viedo button above to view the flight trajectory in the numerical simulation results.


